

Origami Publication Appears in Science Advances
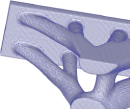
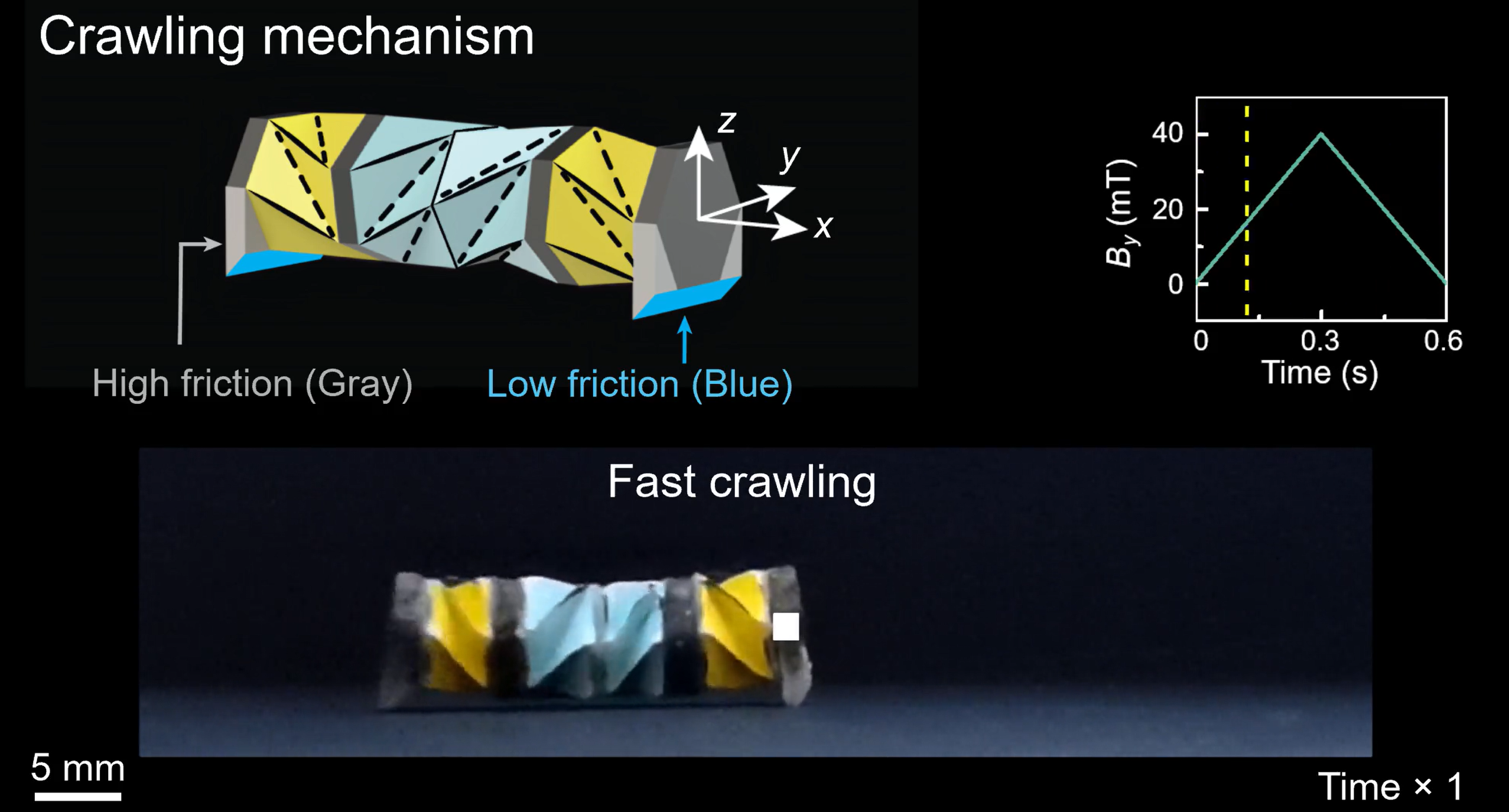
Prof. Glaucio H. Paulino and collaborators Dr. Qiji Ze, Shuai Wu, Jun Nishikawa, Jize Dai, Yue Sun, Sophie Leanza, Cole Zemelka, Dr. Larissa Novelino, and Prof. Ruike Zhao, engineered a magnetically actuated small-scale Kresling crawler with in-plane contraction contributing to the field of biomimetic soft robotics. The magnetically actuated small-scale origami crawler address challenges of locomotion in small-scale and complex, confined spaces. This is possible due to the in-plane contracting mechanism of a four-unit Kresling pattern achieved by magnetic, untethered actuation of the two Kresling dipoles with two-level symmetry for purely translational crawling motion. The magnetic actuation applies appropriate torque distribution allowing for both crawling and steering capabilities. The Kresling crawler is a multifunctional robot with anisotropic and tunable stiffness, steering and crawling capabilities in small confined spaces, and an internal cavity for storage, presenting an ideal device for minimally invasive biomedical applications such as drug delivery.
The work was published in Science Advances on February 1, 2022.
View Abstract
View Full Text (PDF)
View Supplementary Information (PDF)
Direct Link to Journal



Links and Press Releases



Online News Coverage