

Origami Publication Appears in PNAS
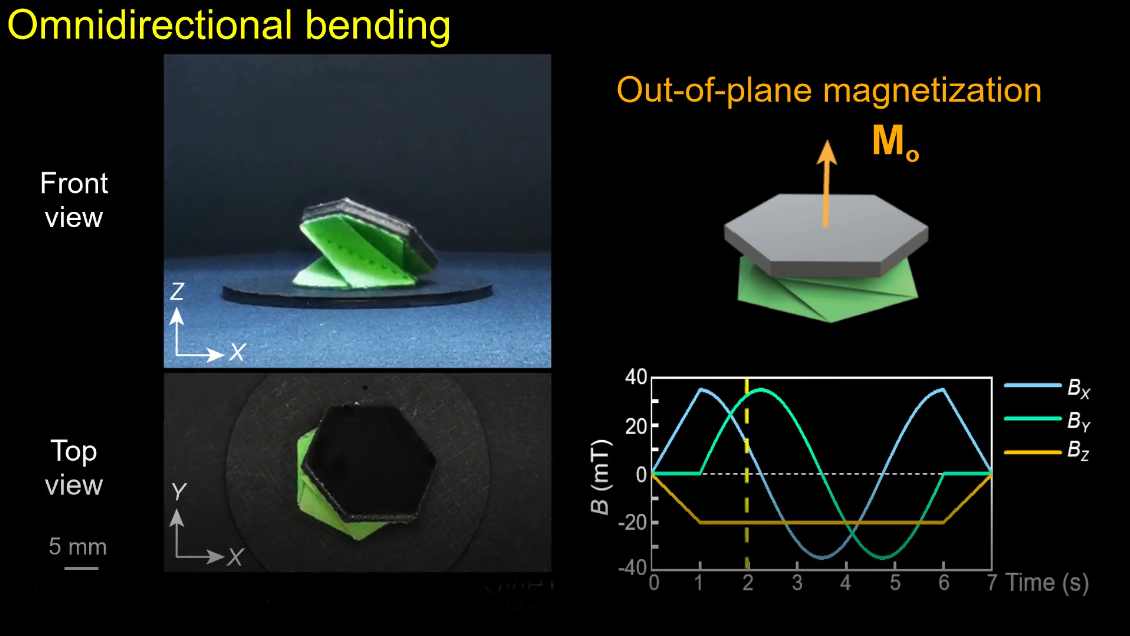
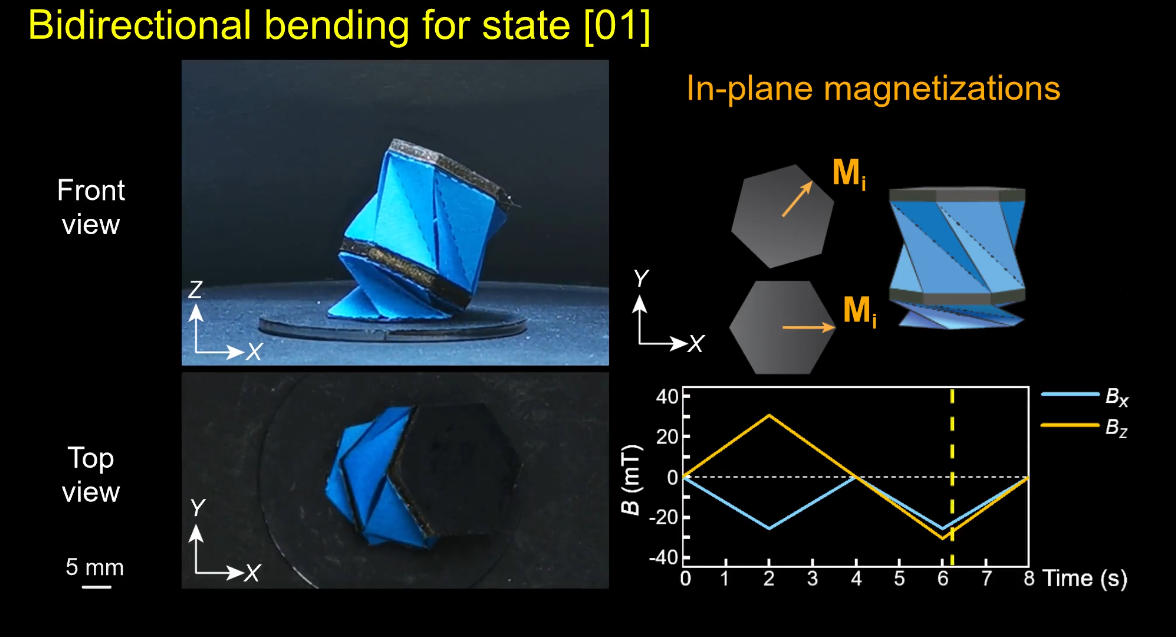
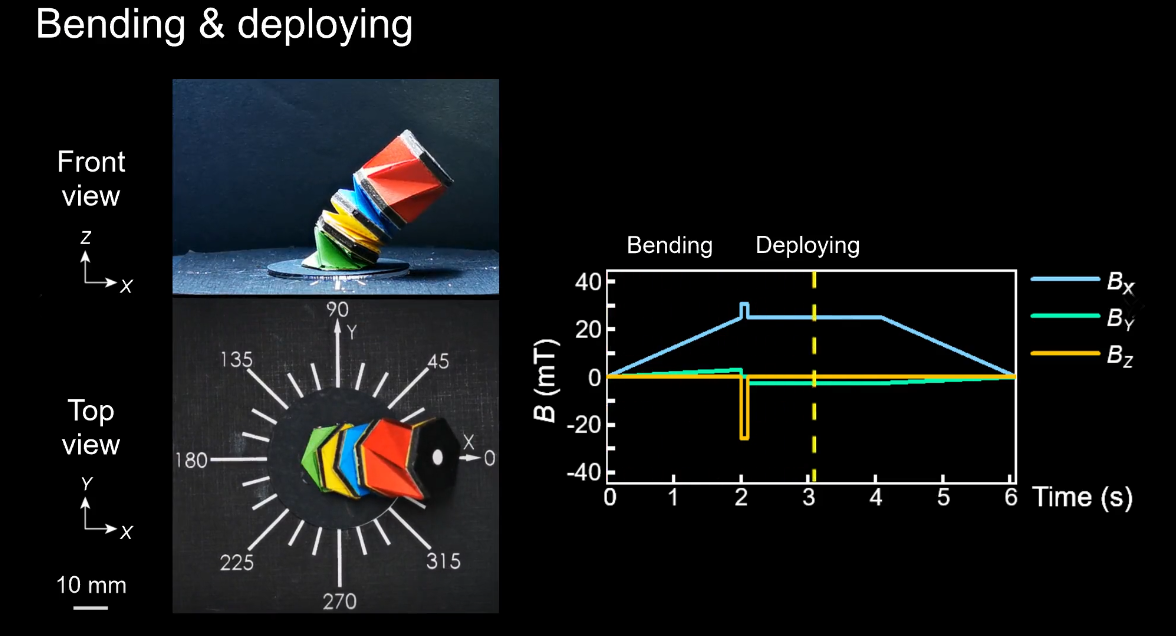
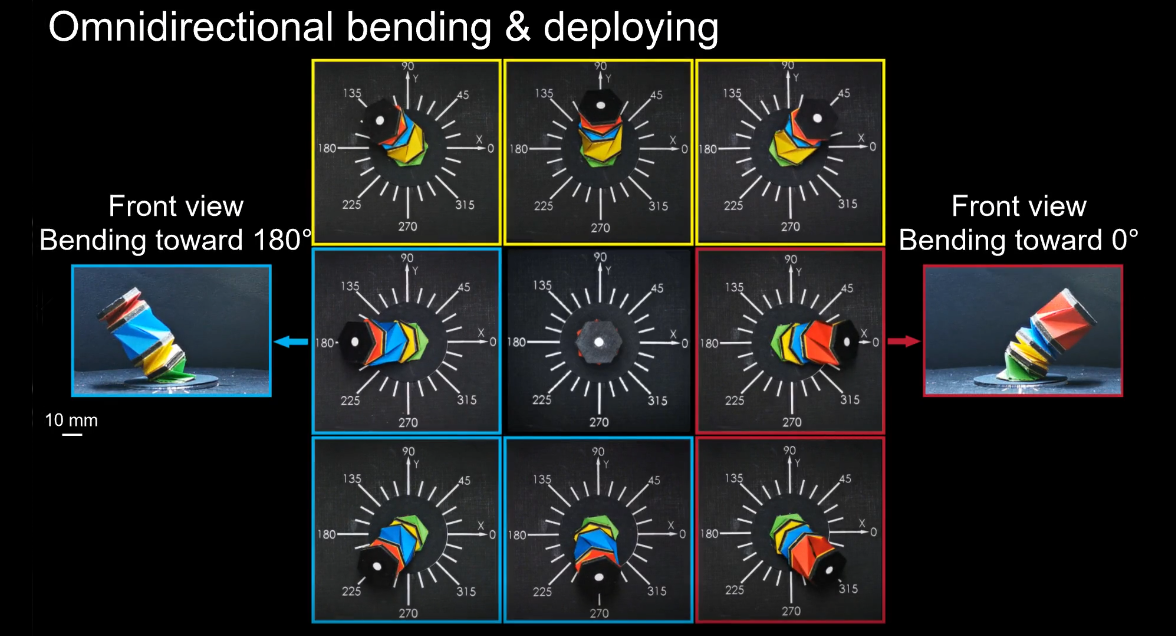
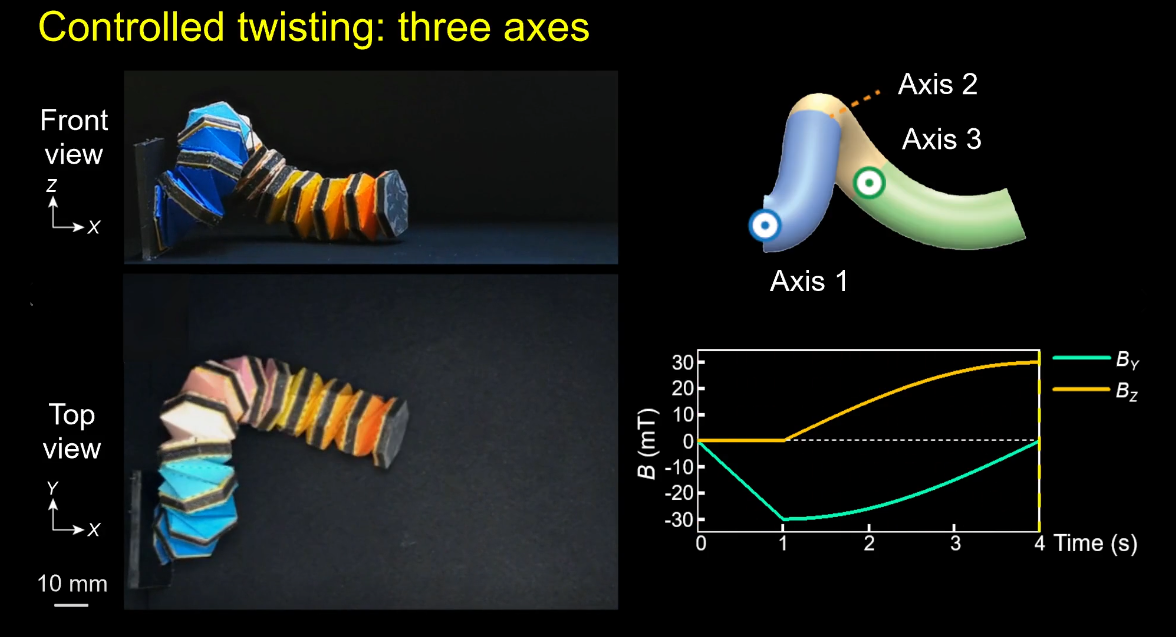
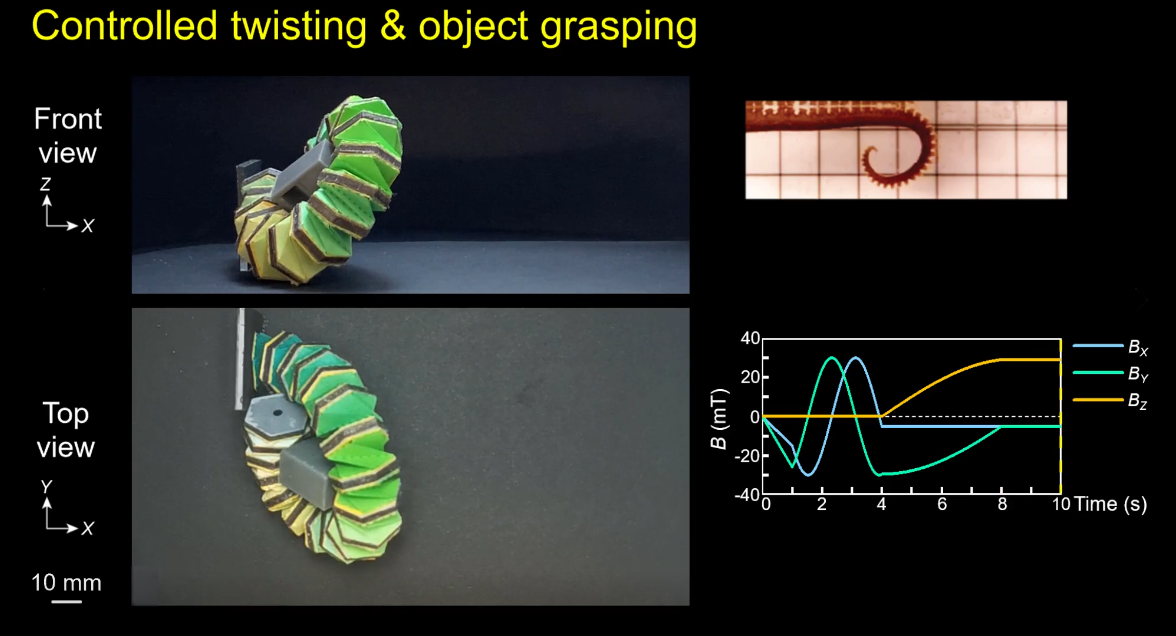
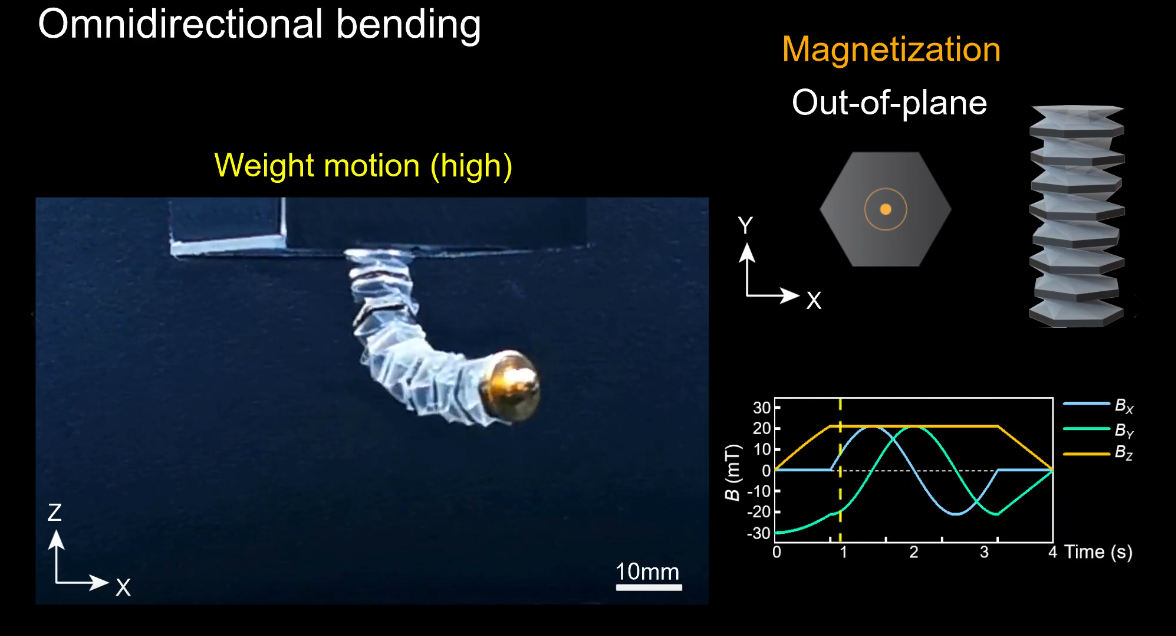
Prof. Glaucio H. Paulino and research group member Nupur Udipi, along with collaborators Prof. Ruike Zhao, Shuai Wu, Dr. Qiji Ze, and Jize Dai from The Ohio State University, designed and engineered magnetically-controlled origami robots from Kresling patterns. The Kresling robots can achieve precisely-controlled multimodal deformations that are reminiscent of the movement of an octopus. For example, the Kresling robots integrate stretching, folding, omnidirectional bending, and twisting to facilitate locomotion, grasping, and lifting. The non-contact, remote-controllable, magnetic actuation promotes biomedical and other applications in which access is limited (e.g., endoscopy, intubation, catheterization).
The work was published in PNAS on August 31, 2021.
View Abstract
View Full Text (PDF)
View Supporting Information (PDF)
Direct Links to Journal:
Link to Paper
Link to Supporting Information
 |
 |
| Download Movie 1 (mov) | Download Movie 2 (mov) |
 |
 |
| Download Movie 3 (mov) | Download Movie 4 (mov) |
 |
 |
| Download Movie 5 (mov) | Download Movie 6 (mov) |
 |
|
| Download Movie 7 (mov) |

Links and Press Releases


Online News Coverage