Soft Robotic Origami Crawler
Qiji Ze, Shuai Wu, Jun Nishikawa, Jize Dai, Yue Sun, Sophie Leanza, Cole Zemelka, Larissa Novelino, Glaucio H. Paulino, and Ruike Renee Zhao
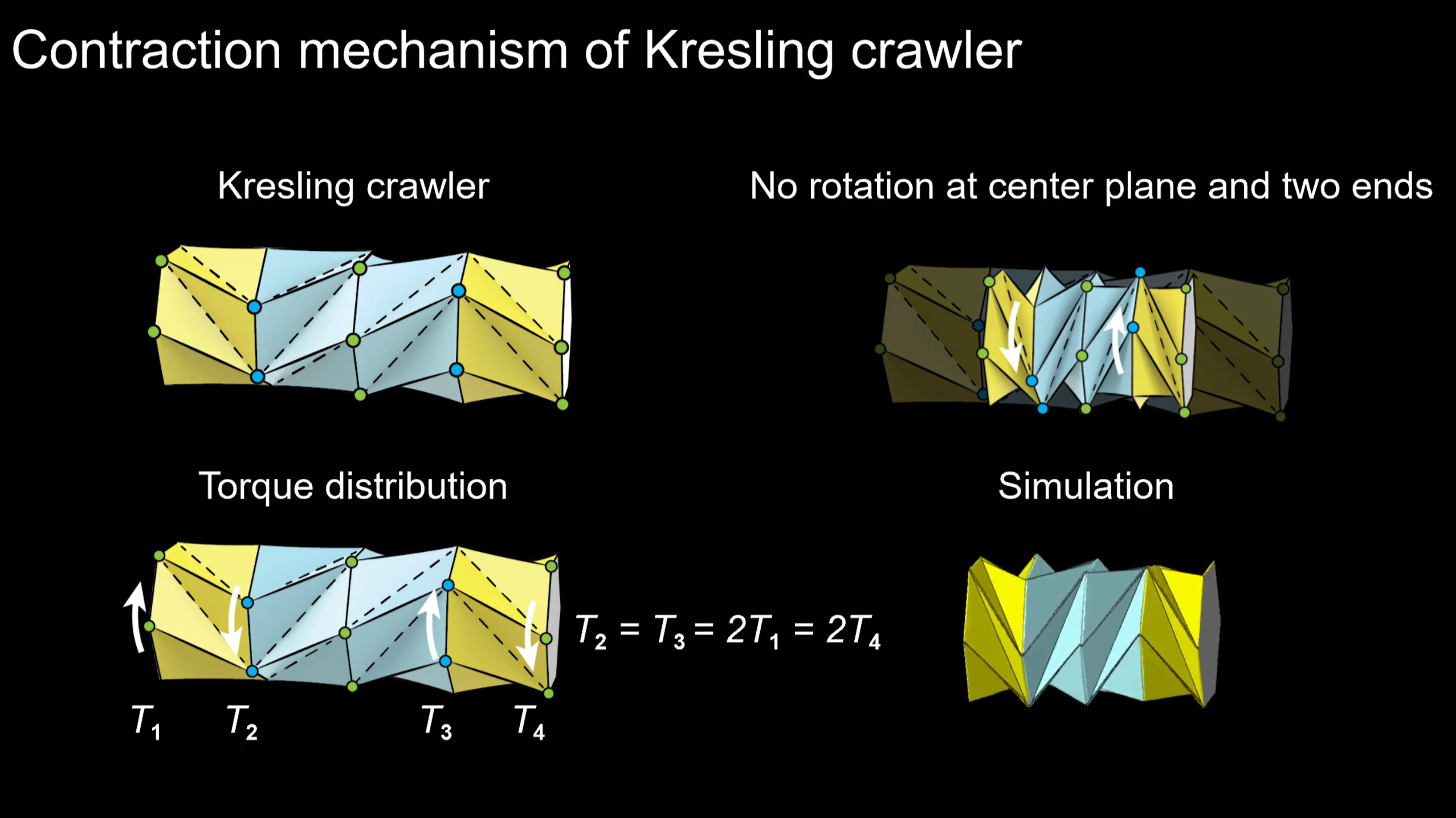
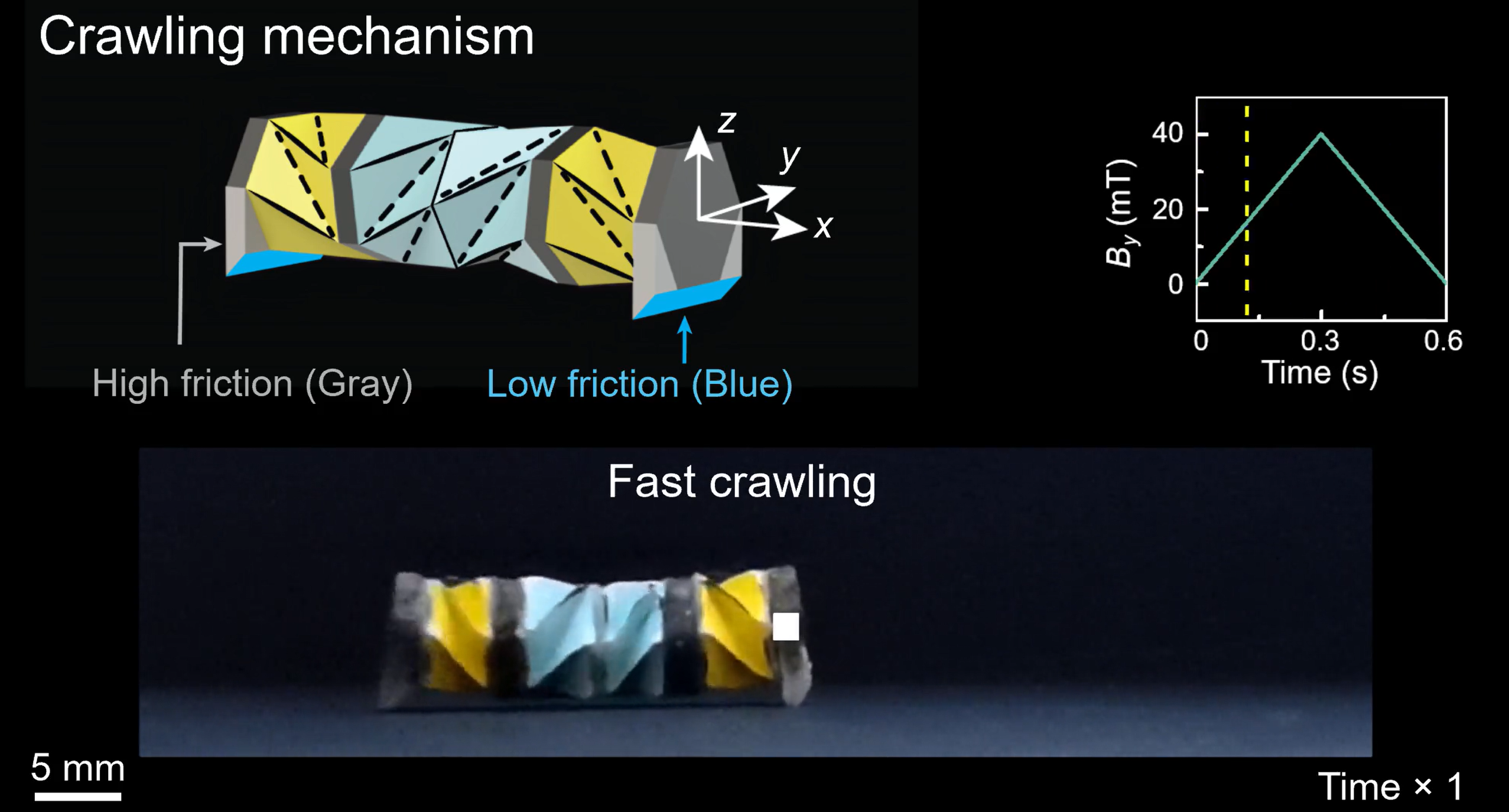
Biomimetic soft robotic crawlers have attracted extensive attention in various engineering fields, owing to their inherent adaptivity to different terrains. Earthworm-like crawlers realize locomotion through in-plane contraction, while inchworm-like crawlers exhibit out of-plane bending-based motions. The in-plane contractive crawling mechanism surpasses the bending-based one in confined spaces where out-of-plane motion is either constrained or unfeasible. Although in-plane contraction crawlers are more effective in confined spaces, miniaturization is challenging due to the limitations of actuation methods and complex structures. To address those challenges, we report a magnetically actuated small-scale origami crawler with in-plane contraction. The contraction mechanism is achieved through a four-unit Kresling origami assembly consisting of two Kresling dipoles with two-level symmetry designed for purely translational crawling motion. Magnetic actuation is utilized to provide appropriate torque distribution on the crawler, enabling a small-scale and untethered robot with both crawling and steering capabilities. Because the Kresling crawler exhibits anisotropic and magnetically tunable structure stiffness, it can overcome the large resistance from severely confined spaces during crawling. Finally, the multifunctionality of the crawler is explored by utilizing the internal cavity in the Kresling origami for drug storage and release. The magnetic origami crawler has the potential to serve as a minimally invasive device for biomedical diagnoses and treatments.
View Full Text (PDF)
View Supporting Information (PDF)
Direct Link to Journal